Озаботился постройкой трикоптера на arduino. Так как тратить много не хотелось, решил строить на основе связки arduino+Wii Motion Plus+Nunchak. Она облетана множеством людей и показалась мне интересной в постройке.
Из нунчака выдирают плату гироскопа, а из motion plus плату с акселерометрами. Все это замечательным образом присоединяется по протоколу I2C к мозгам в виде arduino и питается от 3.3V. Даже прошивку не нужно писать, все сделало сообщество wiicopter.
Правда при покупке нунчака вышла накладка. Я невнимательно посмотрел на упаковку и купил беспроводной. Вдоволь налюбовавшись внутренностями вернул в магазин и купил обычный проводной.
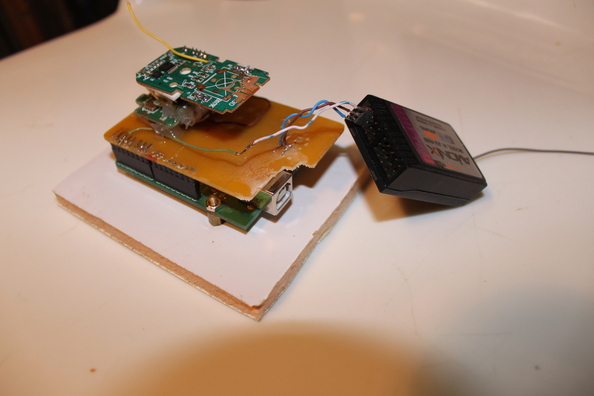
Первым делом спаял пробный shield. Да колхоз, но свою работу он выполнил: платка определяет свое положение в пространстве и пытается двигать отсутсвующей сервой.
Пришло понимание, что сделать трикоптер мне по силам и я заказал комплектующие из Китая.
Пока жду посылку, проектирую плату. Колхоз запускать не хочется. Для проектирования воспользовался программой Eagle, благо она бесплатная.
Не буду описывать как с ней работать, скажу лишь вкрадце, что для начала надо нарисовать принципиальную схему, а затем расположить на плате компоненты и дорожки.
Принципиальная схема:
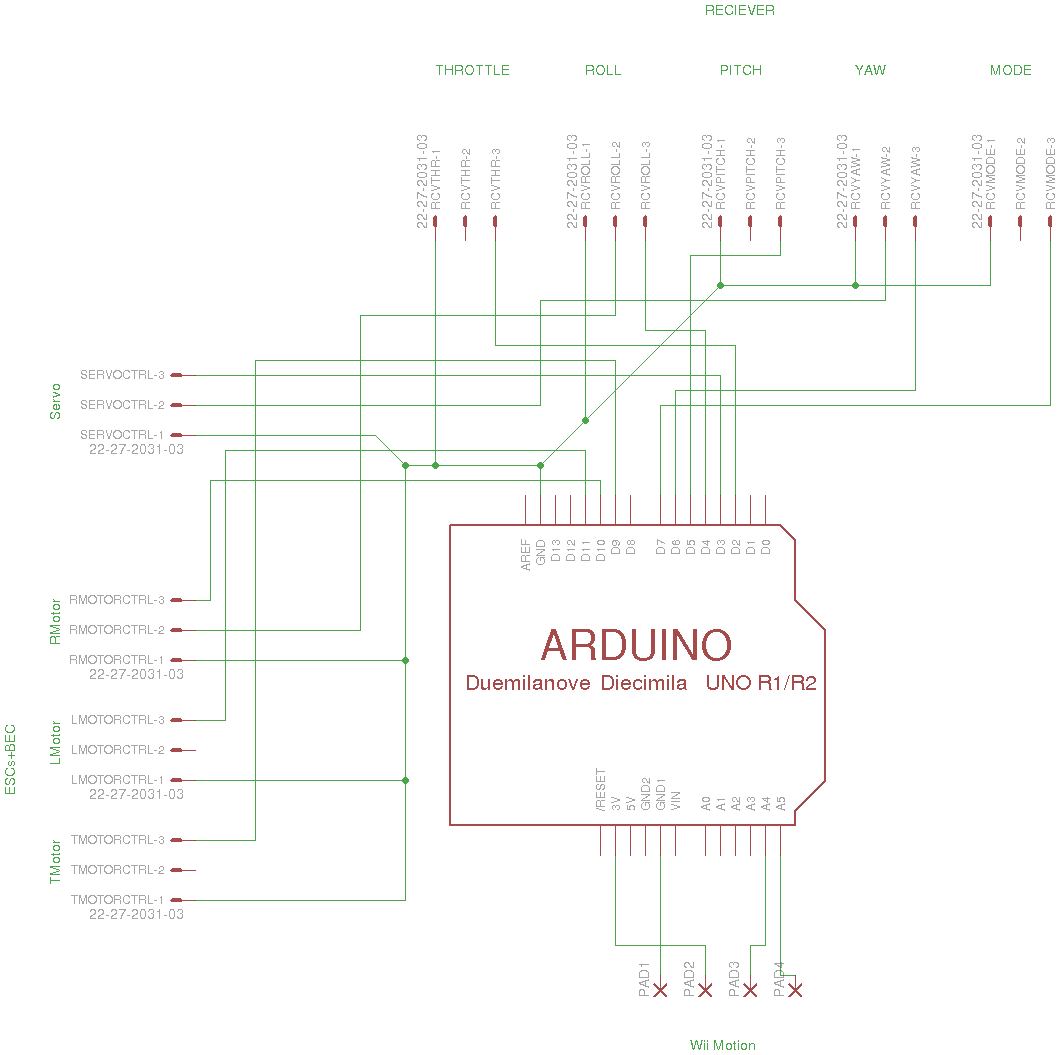
Схема платы:
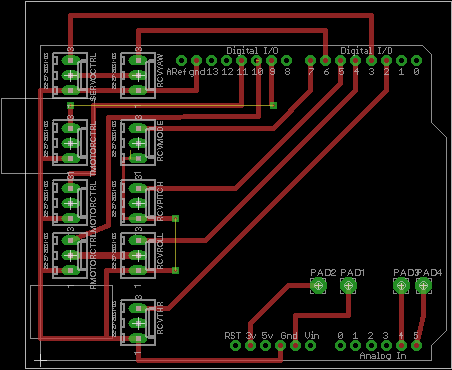
Пока это тестовая версия платы. Да и вообще делал плату я в первый раз, потому не исключены огрехи.
Вот и все пока на сегодня. Будем ждать.